The challenge is to engineer a scaled electric-powered dragster capable of traveling 20 meters in less than two seconds.
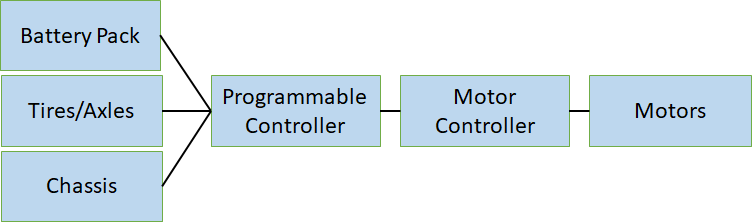
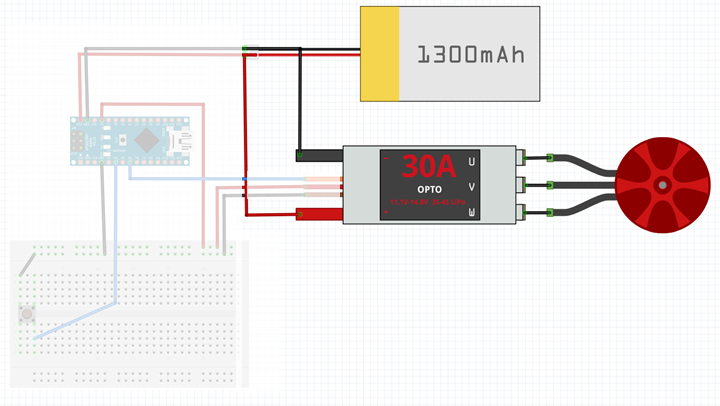
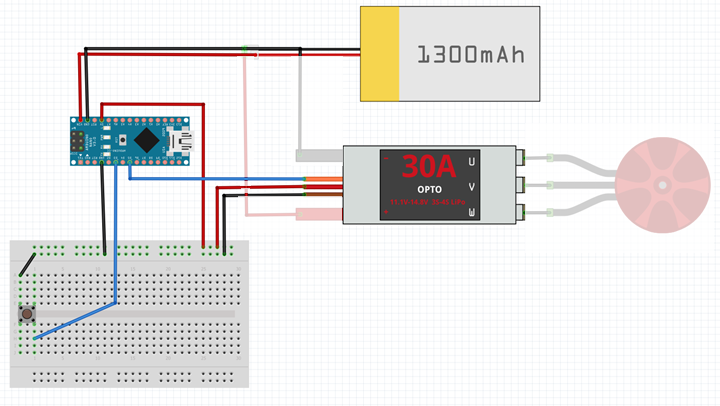
This R&D project involves designing a technological system. A system relies on components working together to meet the overall system goal. For the eDragster System, the goal is to accelerate as fast as possible, finishing the race in less than two seconds. The components to accomplish this goal include a battery pack, two brushless DC motors (BLDC), an Arduino microcontroller, two Electronic Speed Controllers (ESCs), wheels/tires and chassis.
R&D involves designing, analyzing and optimizing each component to improve the measured performance of the entire system. For this design, the measured performance is track speed in seconds. Make the car go fast, then faster.
The battery pack must provide the high-power requirements of the motors and voltage requirements of the digital and power electronics. Battery technology has advanced greatly over the past 30 years. To date, lithium batteries are the most efficient on the market. Efficient, meaning they can be charged and discharged with less loss than other battery types such as NiCd and NiMH rechargeable batteries. And, they are smaller and lighter than other battery types with equal capacity. The better the battery, the greater the range, so battery technology is a key research target to improve electric vehicles.
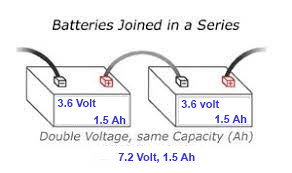
Batteries can be connected in series or parallel to get the needed output. Battery cells connected in series increase voltage. Lithium-ion batteries are typically 3.6v per cell. Two 3.6v cells connected in series results is a 7.2v battery pack—three cells in series 11.1v. Either will work for this design.
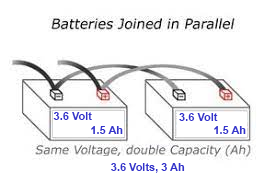
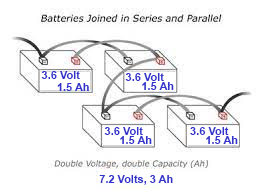
Parallel connection increases amperage capacity. Amp-hours (Ah) define the range of an electric vehicle. Simply stated, if a battery has a capacity of 1.5 Ah and the motor consumes .5 Ah, the car will run for 3 hours, 1.5Ah / 0.5Ah = 3 hours. Adding a separate battery in parallel would extend the capacity to 6 hours, doubling the range. Using this wiring configuration, series-parallel joined batteries increase both voltage and capacity.
 |
 |
 |
How much voltage is needed? First, match the voltage requirement of the motor. Then, match the supply voltage of the controller. The Arduino will accept 6-20v at the Vin pin, so anything will work in this range. **IMPORTANT** check the specs of your board to find the acceptable voltage range to power the board. For the digital components, a 5v output pin is available on the Arduino using a built-in voltage regulator. Motor voltage requirments
How much amperage is needed? This is the capacity of the battery. It's like the gas tank capacity, 10,15, 20 gallons. It does determine how far a vehicle will travel on a single charge. The range of an electric vehicle is a function of the battery capacity and the amount of electricity the motor consumes.
For the eDragster, the range is not the goal, so high capacity is not needed for range but rather torque. If the battery cannot provide the amps the motor needs, acceleration will be limited. Check the motor specs to determine what is needed…
Voltage, amperage, size and weight are factors in choosing a battery.
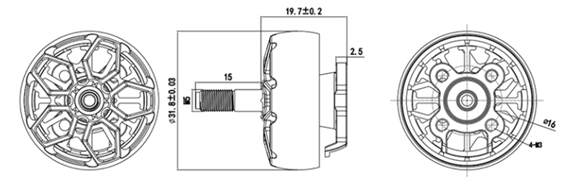
 Brushless DC motors (BLDC) use three wires to receive a sequence of pulses that rotate the armature. The three-wire connection that supplies power to the motor requires an adapter or interface. An Electronic Speed Control (ESC) does the job. An ESC is a circuit that translates the signal from a controller (Arduino) to the current required to power the motor. Brushless DC motors produce higher torque than brushed motors using fewer parts (no brushes). With microcomputer control, BLDCs have precise speed and direction control.
Brushless DC motors (BLDC) use three wires to receive a sequence of pulses that rotate the armature. The three-wire connection that supplies power to the motor requires an adapter or interface. An Electronic Speed Control (ESC) does the job. An ESC is a circuit that translates the signal from a controller (Arduino) to the current required to power the motor. Brushless DC motors produce higher torque than brushed motors using fewer parts (no brushes). With microcomputer control, BLDCs have precise speed and direction control.
Torque, size and weight are factors in choosing a motor.
 A microcontroller is a specialized computer used to control many of our consumer devices. From dishwashers to electric vehicles, microcontrollers provide the brains to control technologies.
A microcontroller is a specialized computer used to control many of our consumer devices. From dishwashers to electric vehicles, microcontrollers provide the brains to control technologies.
The Arduino is the microcontroller used in Proto-1. This micro-computer is well suited for this application because of the following features.
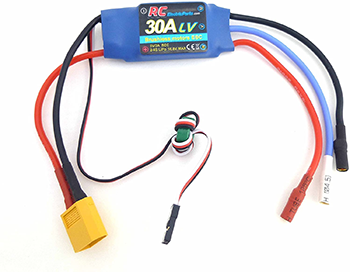 One of the main functions of an ESC is to separate power electronics from digital electronics. On the power side, motors can draw as much as 30A. Controller boards cannot handle that volume of electricity, so the digital side is isolated.
One of the main functions of an ESC is to separate power electronics from digital electronics. On the power side, motors can draw as much as 30A. Controller boards cannot handle that volume of electricity, so the digital side is isolated.
The Power Side supplies the amps needed to power the motors. The amp rating of the ESC should match the maximum current draw of the motor. |
 |
The Digital Sidepowers the digital electronics, which runs on much less amperage. |
 |
Understanding the specification of each component is important. When selecting components, ensure that the battery pack’s voltage and amperage output match motor requirements. On the digital side, the Arduino board with a 6-20v input range and a voltage regulated 5v output pin will work with most battery packs
 Traction is an essential concern. The motors provide more torque than the tire's traction force can handle. So, get better tires or accelerate slower. Actually, both are solutions. There are a variety of rubber/plastic/foam compounds available for scaled RC cars. These tires and wheels can be adapted to eDragsters. The tires used on Proto-1 have a 52mm diameter and ___mm width.
Traction is an essential concern. The motors provide more torque than the tire's traction force can handle. So, get better tires or accelerate slower. Actually, both are solutions. There are a variety of rubber/plastic/foam compounds available for scaled RC cars. These tires and wheels can be adapted to eDragsters. The tires used on Proto-1 have a 52mm diameter and ___mm width.
As for acceleration control, programming can handle that task. Arduino can be programmed to ramp motor torque.
 The chassis is the base frame of a vehicle. The design goal is to hold all the mechanics and electronics so it functions as a vehicle. . Often, chassis are designed to carry humans and cargo but not in this case. Package design is the focus.
The chassis is the base frame of a vehicle. The design goal is to hold all the mechanics and electronics so it functions as a vehicle. . Often, chassis are designed to carry humans and cargo but not in this case. Package design is the focus.
Automobile chassis designs include ladder, tubular frame and unibody. Proto-1 uses ladder frame design with 3mm carbon fiber rails and aluminum standoffs for cross-braces. Weight and strength is the key. Design to lower the weight while increasing the strength.
How do you decide which component is best... through predictive analysis (simulations) and bench testing. That's the R&D way.